Automated Valet Parking
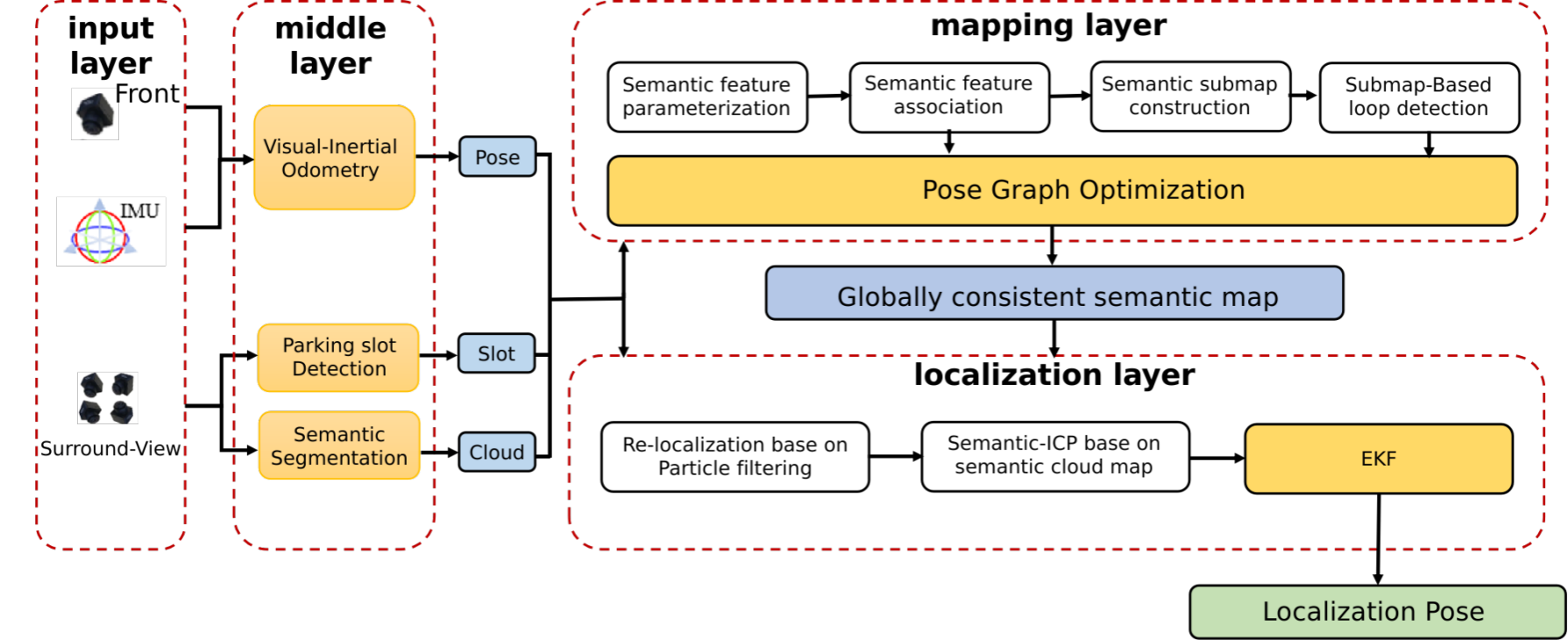 AVP Mapping and Localization Pipeline
AVP Mapping and Localization Pipeline
The Automated Valet Parking project contains a total of multi-task perception system, multi-sensor offline and online calibration, visual inertial odometry, global position estimation based on multi-sensor fusion, semantic map construction, semantic map-based localization and repositioning, travel lane and parking planning, and vehicle control algorithms. Specific responsibilities are listed below:
- Semantic cloud-point map construction is realized. The semantic pixels of the surround view map are obtained by IPM (inverse perspective projection) technique, the point cloud is rasterized manually, and the semantic categories of each raster are counted by using the voting mechanism algorithm to construct the semantic raster map.
- Semantic feature map construction. Combining the semantic features of parking environment (e.g., parking spaces, ground markings, etc.) and the odometer position to construct a factor map, we jointly optimize the position and map semantic features to construct a semantic feature map.
- Implement bag-of-words-based loopback detection algorithms and explore multiple bag-of-words models; complete the correction of cumulative map drift and construct a globally coherent map.