Intelligent Collection of Lane
 Vector Lane Line Map Construction Pipeline
Vector Lane Line Map Construction Pipeline
The background of the Road Path Acquisition System project is that the lane lines of the highway have been severely worn for a long time and need to be re-striped. The location information of lane lines needs to be collected before construction. The project contains a total of AI lane line perception algorithm, Multi-sensor offline and online calibration, visual inertial odometer, global position estimation based on multi-sensor fusion, online construction of vectorized lane lines based on factor graphs. Specific responsibilities are listed below:
- Responsible for the construction of hardware platforms for cameras, IMUs and self-built base station RTKs, and the completion of internal and external parameter calibration of cameras, time delay calibration, and noise parameter calibration of IMUs.
- Responsible for implementing a tightly coupled positioning system based on the VINS framework for RGB-D cameras, IMUs, and tachometers, with dynamic feature point filtering, and robust position estimation of road acquisition equipment using multi-worker Trick. Loosely coupled local mileage meter and global RTK positioning results to achieve global driftless vehicle positioning.
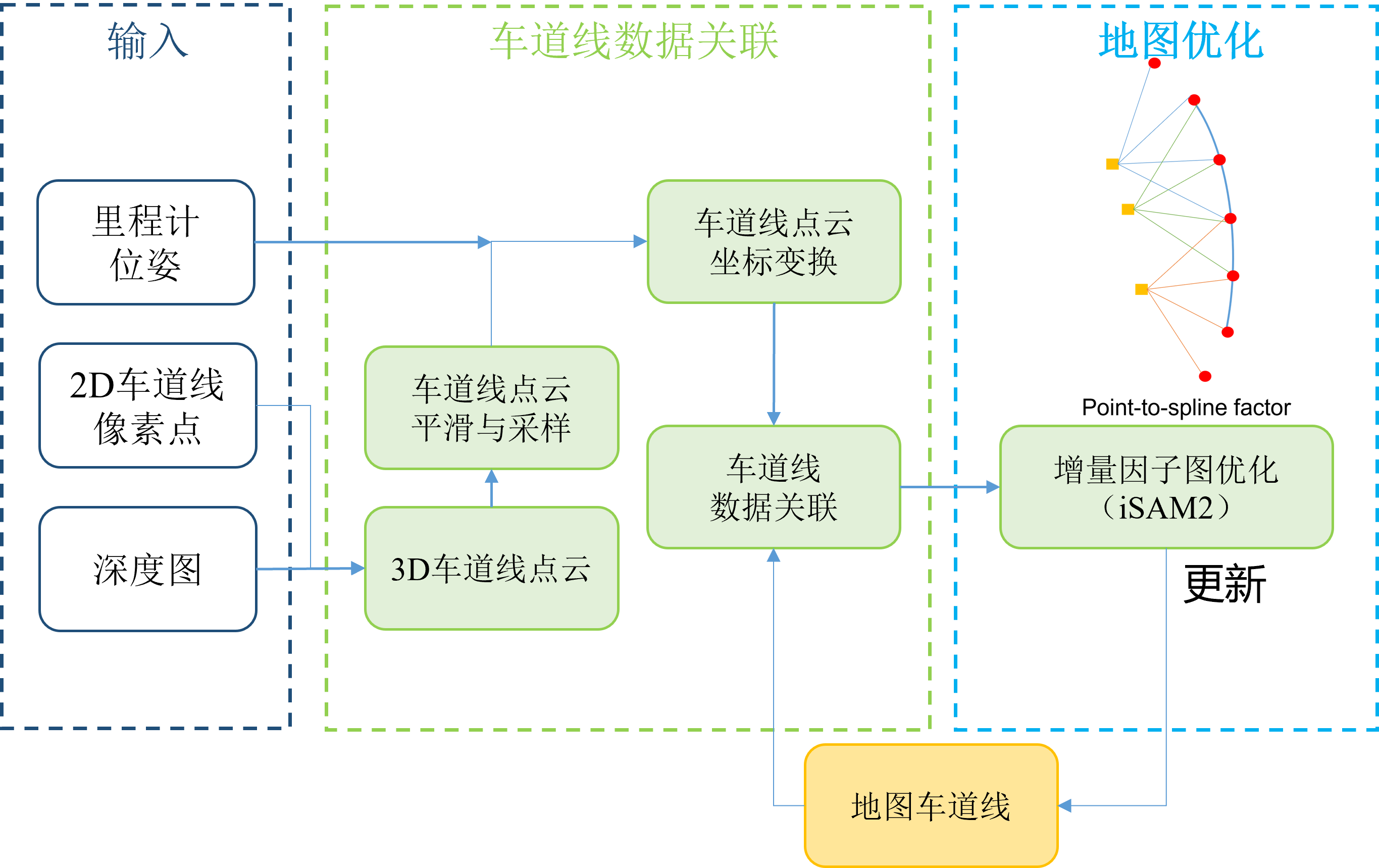
- The Catmull-Rom spline map is constructed based on the Catmull-Rom spline curve. The road line association process is modeled as a two-dimensional graph assignment problem, and the Chamfer distance and lateral distribution of the road lines are taken into account to assign weights to the edges of the graph, and the Hungarian algorithm is used to solve the maximum matching problem. The control point initialization, spline parameterization and optimization methods are designed to construct and optimize the lane line spline curves step by step.