Automatic Intelligent Weeding Robot
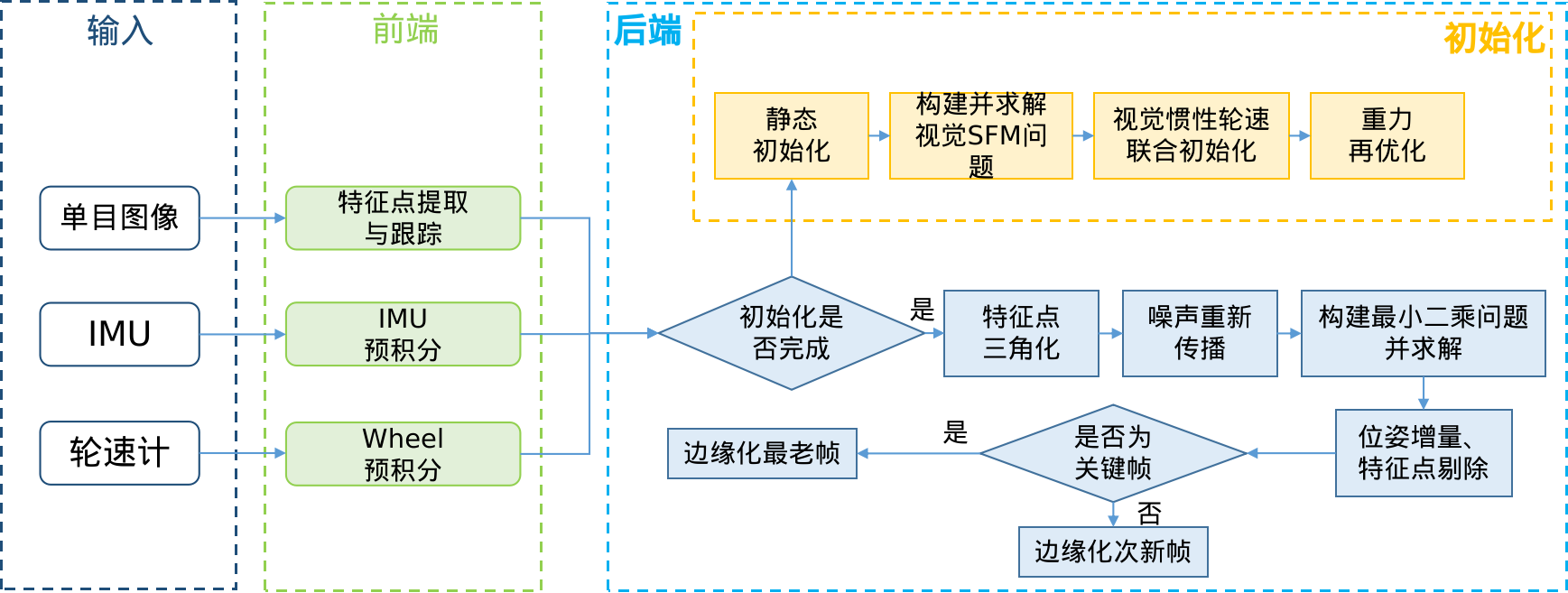 VIW-Odometry PipeLine
VIW-Odometry PipeLine
The Automatic Intelligent Weeding Robot project contains a total of multi-task perception system, multi-sensor offline and online calibration, visual inertial odometry, global position estimation based on multi-sensor fusion, semantic map construction, semantic map-based localization and repositioning, travel lane and parking planning, and vehicle control algorithms. Specific responsibilities are listed below:
- Responsible for implementing a tightly coupled odometry system fusing monocular camera, IMU and wheel tachometer based on the VINS framework, realizing the robust initialization of dynamic and static joint, utilizing a variety of engineering Trick to realize the robust estimation of lawn mower's attitude, solving the problem of trajectory drift in the scenarios such as wheel slippage, long static, strong bumps, and dynamic objects, and achieving the RTE index up to 1.2% in a grass environment, and the RRE index up to 0.011deg/m.
- It is responsible for constructing a loosely coupled factor map framework fusing VIW odometry, IMU & wheel speedometer closed-integrated odometry and RTK observation, realizing the online calibration of local ENU coordinate system and global ECEF coordinate system external reference, solving the problem of continuous positioning of the system under the RTK occlusion scenario, and reducing the RTE index to 0.15% under the position fusion framework.
- Implementation of AprilTag-based relocation error assessment algorithm.