环视相机在线标定
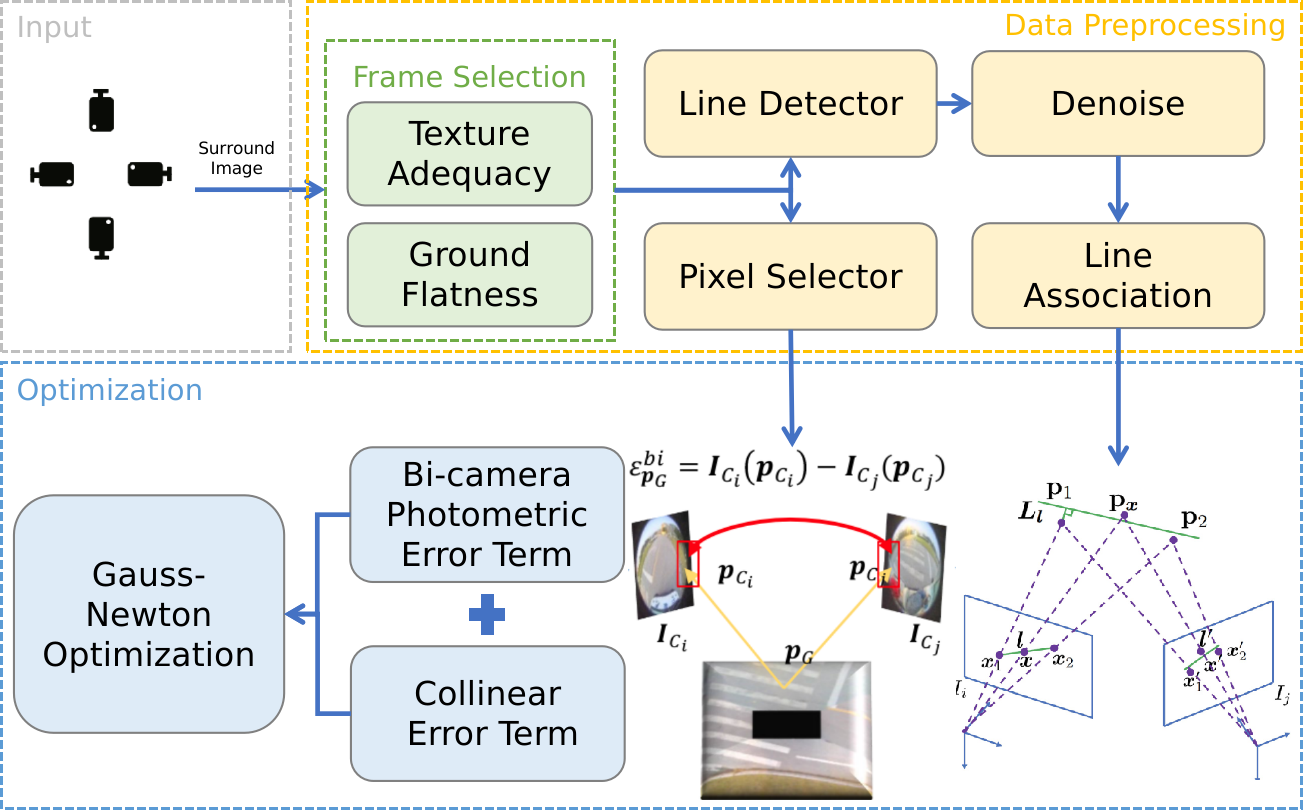 标定算法框架
标定算法框架
环视相机在线标定项目背景为车载环视相机模组由于长时间的运行或者维修工作,导致环视相机位置发生偏移, 需要重新标定,需要实现道路行驶过程中在线地矫正环视相机的外参。具体负责内容如下:
- 实现图像预处理,基于像素梯度幅值的关键点选取以及自适应ROI选取
- 利⽤环视相机⻦瞰图投影共视区域⾥像素光度的⼀致性,构建光度残差关于环视相机外参的优化问题, 使⽤Ceres优化库进⾏封装,利⽤L-M优化器完成算法迭代优化。
标定算法框架
环视相机在线标定项目背景为车载环视相机模组由于长时间的运行或者维修工作,导致环视相机位置发生偏移, 需要重新标定,需要实现道路行驶过程中在线地矫正环视相机的外参。具体负责内容如下: