自主代客泊车
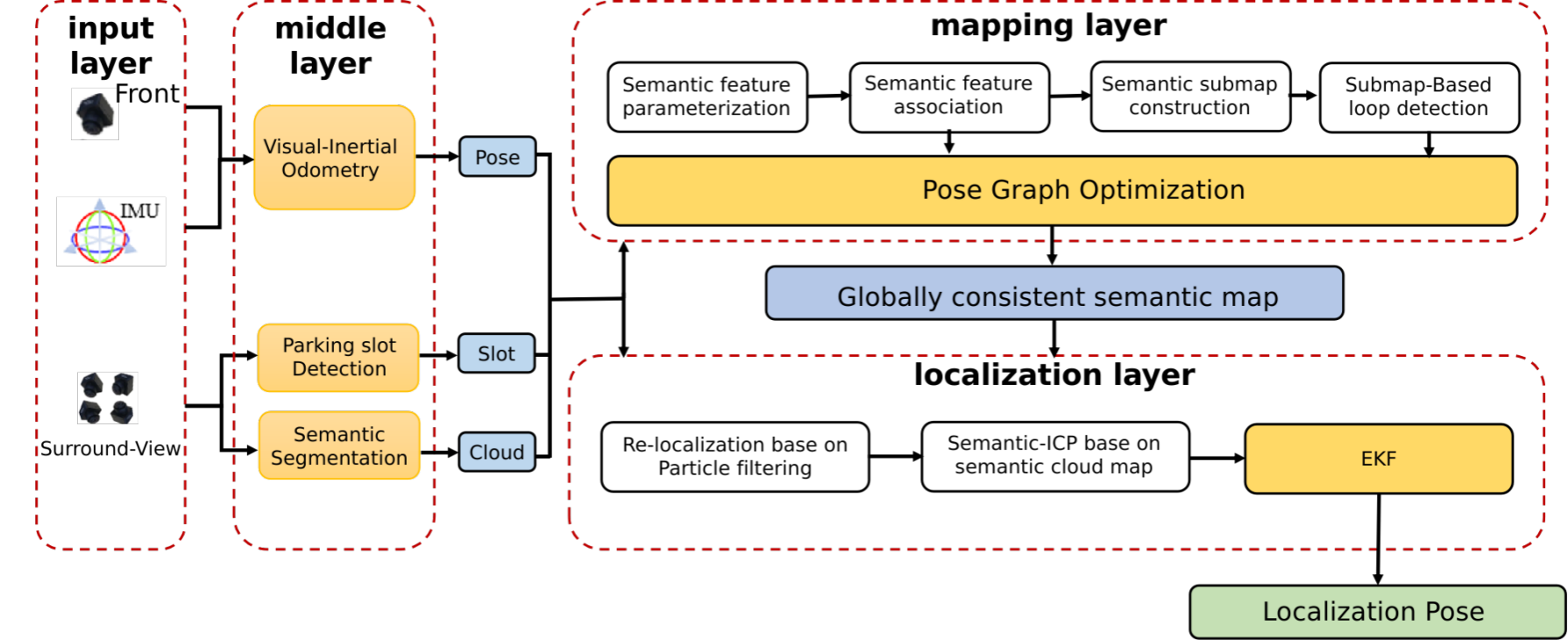 定位与建图框架
定位与建图框架
项目背景实现自主代客泊车功能,在高度动态的地下停车场环境实现long-term的地图构建,项目共包含多任务感知系统、多传感器离线与在线标定、视觉惯性里程计、基于多传感器融合的全局位姿估计、语义地图的构建、基于语义地图的定位和重定位、行车道与泊车规划、车辆控制算法。具体负责内容如下:
- 实现语义栅格地图构建。环视图语义像素通过IPM(逆透视投影)技术得到地面坐标系语义点云,手动完成点云栅格化,利用投票机制算法统计每个栅格的语义类别,构建语义栅格地图。
- 实现语义特征地图构建。结合停车场环境语义特征(如:停车位,地面标志等)和里程计位姿构建因子图,联合优化位姿和地图语义特征,构建语义特征地图。
- 实现基于词袋的回环检测算法,探究多种词袋模型;完成地图累计漂移的矫正,构建全局⼀致的地图。