除草机器人
 上海交通大学与宝时得科技合作项目“除草机器人”
上海交通大学与宝时得科技合作项目“除草机器人”
2021-10-01 ~ 2022-10-01 除草机器人项目共包含AI视觉障碍物分类识别、多传感器离线与在线标定、视觉惯性里程计、基于多传感器融合的全局位姿估计、基于激光雷达和深度相机的障碍物检测技术以及多传感器融合的3D障碍物检测技术。项目中主要负责基于RGB(色彩纹理)与激光雷达(几何)融合的3D障碍物检测技术。具体负责内容如下:
- 负责3D目标检测数据集格式确定,数据处理代码以及数据集标注;
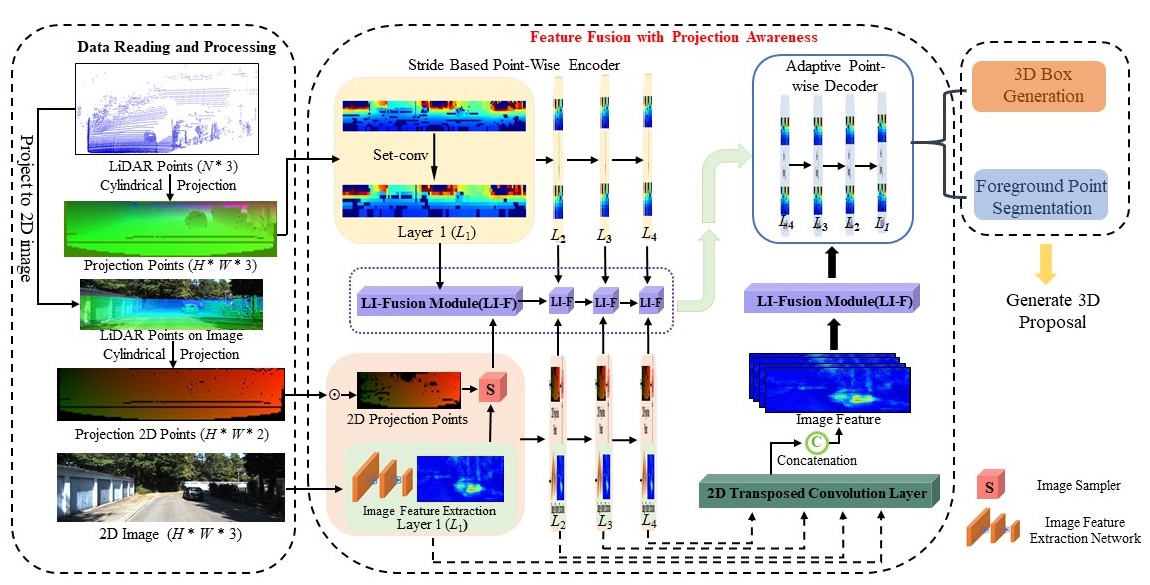
- 基于当前3D目标检测难以利用全部点云信息的挑战,负责研究和设计稠密点云学习的3D目标检测新算子;
- 负责设计色彩纹理的特征编码方法,以及和稠密3D点云特征融合的高效方法;
- 实现点云和色彩特征融合的3D目标检测新框架,并完成全部代码写作;
- 负责进行实验,调优网络细节,实现比现有多模态融合的3D目标检测更高的效果;