道路车道线智能采集
 矢量车道线地图构建框架
矢量车道线地图构建框架
道路路径采集系统项目背景为高速公路车道线长时间磨损严重,需要进行重新划线工作, 在施工前需要采集车道线的位置信息。该项目共包含AI车道线感知算法、 多传感器离线与在线标定、视觉惯性里程计、基于多传感器融合的全局位姿估计、 基于因子图的矢量车道线在线构建。具体负责内容如下:
- 负责相机、IMU和自建基站RTK等硬件平台搭建,完成相机内外参标定、时延标定、IMU噪声参数标定。
- 负责基于VINS框架实现RGB-D相机、IMU和轮速计的紧耦合定位系统,动态特征点滤除,利⽤多种⼯程Trick实现道路采集设备的鲁棒位姿估计。实现局部⾥程计和全局RTK定位结果的松耦合,实现⻋辆全局⽆飘定位。
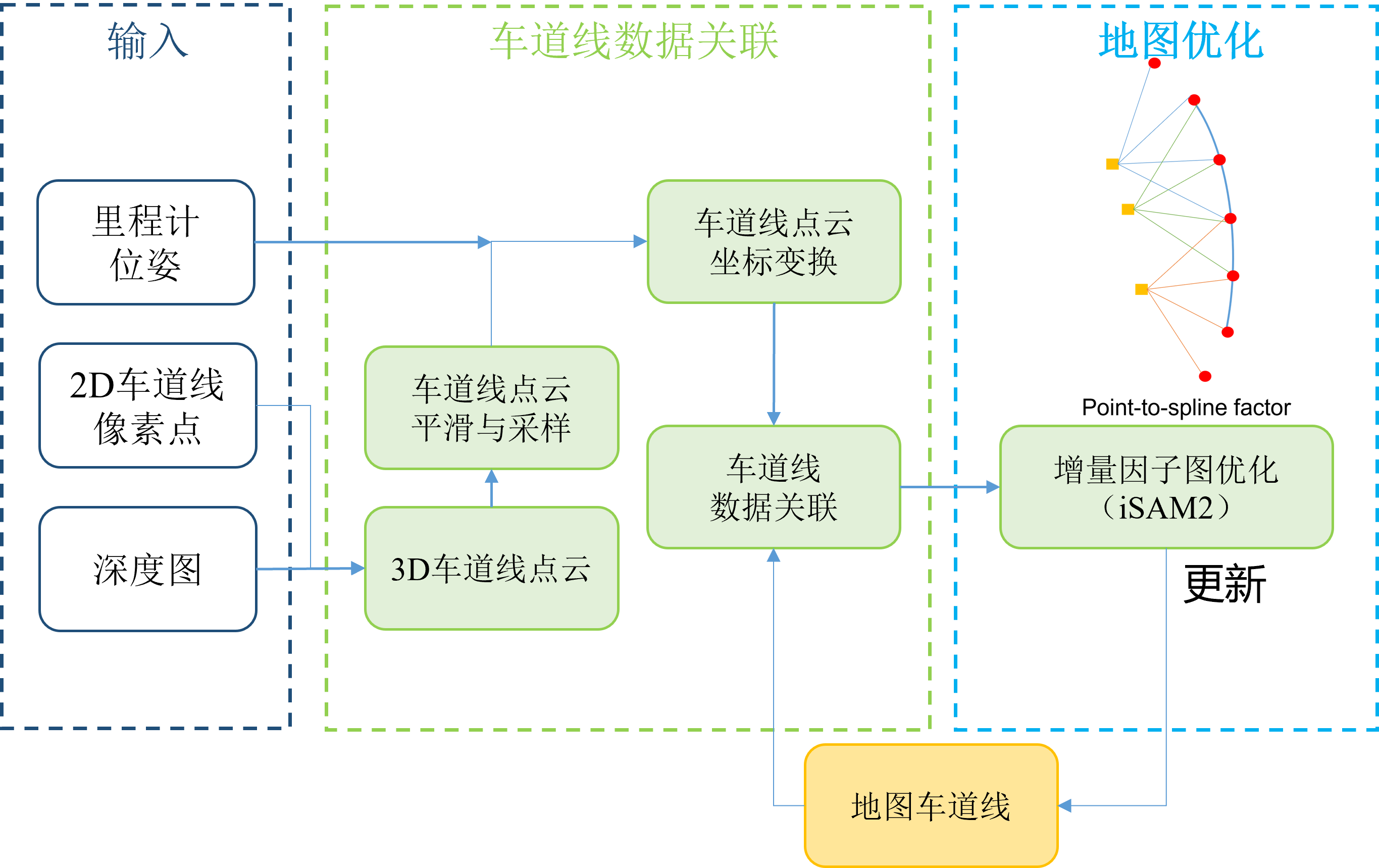
- 实现基于Catmull-Rom样条曲线的⻋道线地图构建,将⻋道线关联过程建模为⼆分图分配问题,考虑到⻋道线Chamfer距离和横向分布⼀致性为图中的边分配权重,采⽤匈⽛利算法求解最⼤匹配问题。并设计控制点初始化、样条参数化和优化⽅法,逐步构建和优化⻋道线样条曲线。