国家自然科学基金 “自学习的机器人动态场景感知”
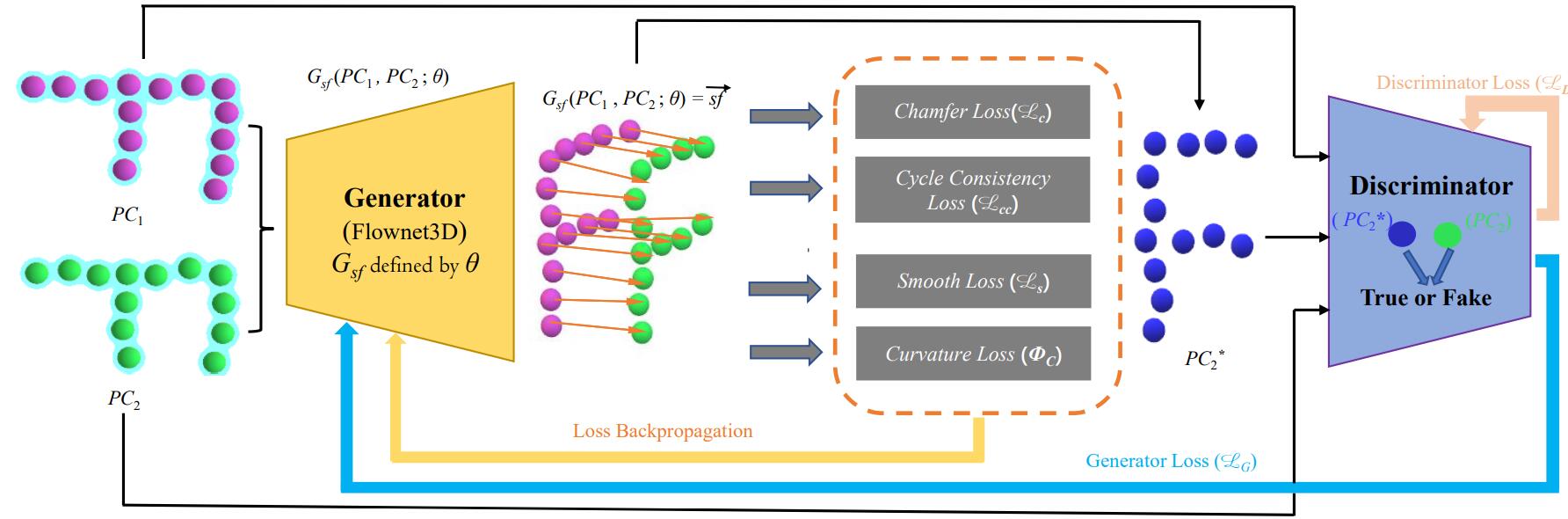 提出的3D场景流无监督对抗学习框架
提出的3D场景流无监督对抗学习框架
2020-12-01 ~ 2021-12-30 中国自然科学基金U1613218、U1913204和62073222的部分资助;部分由上海市教委和上海市教育发展基金会通过 19SG08 下的曙光项目提供;部分来自 NVIDIA 公司的资助。本项目致力于研究缓解机器人动态场景感知面临的成本高精度差的问题,设计新的场景流自学习网络。3D场景流表示了3D空间中每个点的3D运动,可以为自动驾驶和服务器机器人的提供基本3D运动感知。具体负责内容如下:
- 根据提出的新颖的3D场景流自监督学习框架(其中引入了生成对抗思想来学习 3D 场景流)。完成了场景流生成器和点云判别器之间的对抗学习部分的代码实现,使得生成器生成的点云越来越像真实的点云,从而场景流估计越来越准确。
- 设计了四种不同类型的点云判别器,并通过多次实验验证了最佳的鉴别器结构。
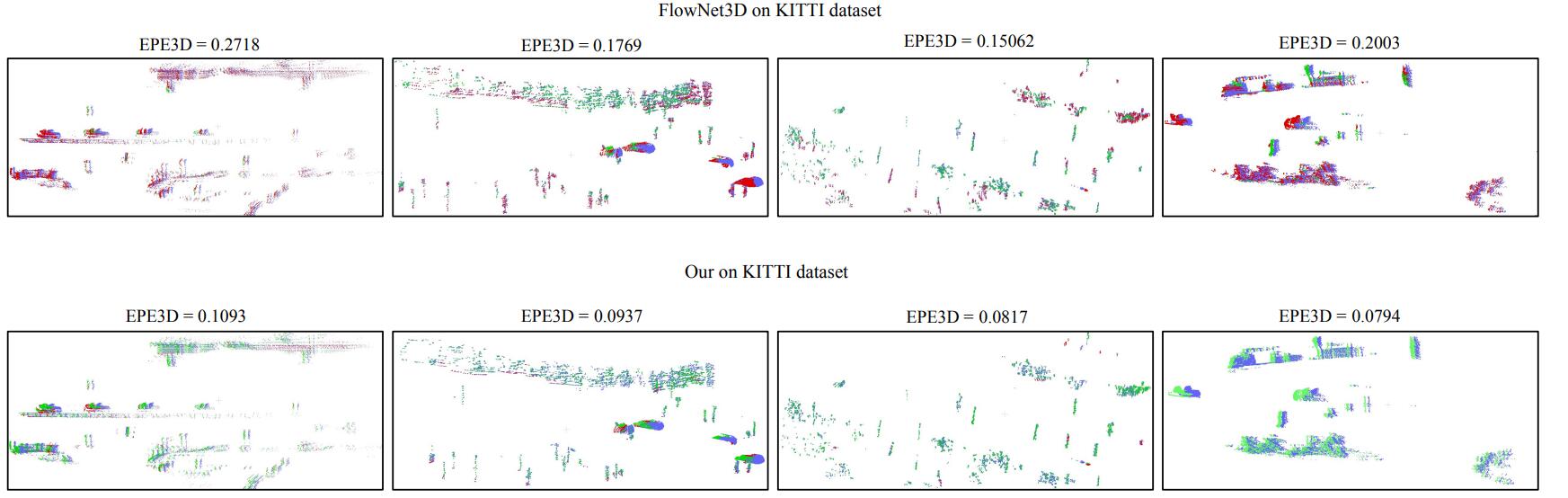
- 负责整个场景流估计框架的实验部分,在公用的KITTI数据集上实验结果表明,在场景流估计中引入对抗性学习思想可以有效提高场景流估计的性能。
在公用的KITTI数据集上可视化 3D 场景流评估的准确性。正确的点显示为绿色,错误的点显示为红色。从实验结果上看,我们为项目中提高3D场景感知精确度做出的一定的探索,并取得了相应的效果。