全自动智能除草机器人
 视觉-惯性-轮速里程计框架
视觉-惯性-轮速里程计框架
智能除草机器人项目背景为实现草坪的无人除草任务。项目共包含AI视觉障碍物分类识别、 多传感器离线与在线标定、视觉惯性里程计、基于多传感器融合的全局位姿估计、 基于激光雷达和深度相机的障碍物检测技术以及多传感器融合的3D障碍物检测技术。具体负责内容如下:
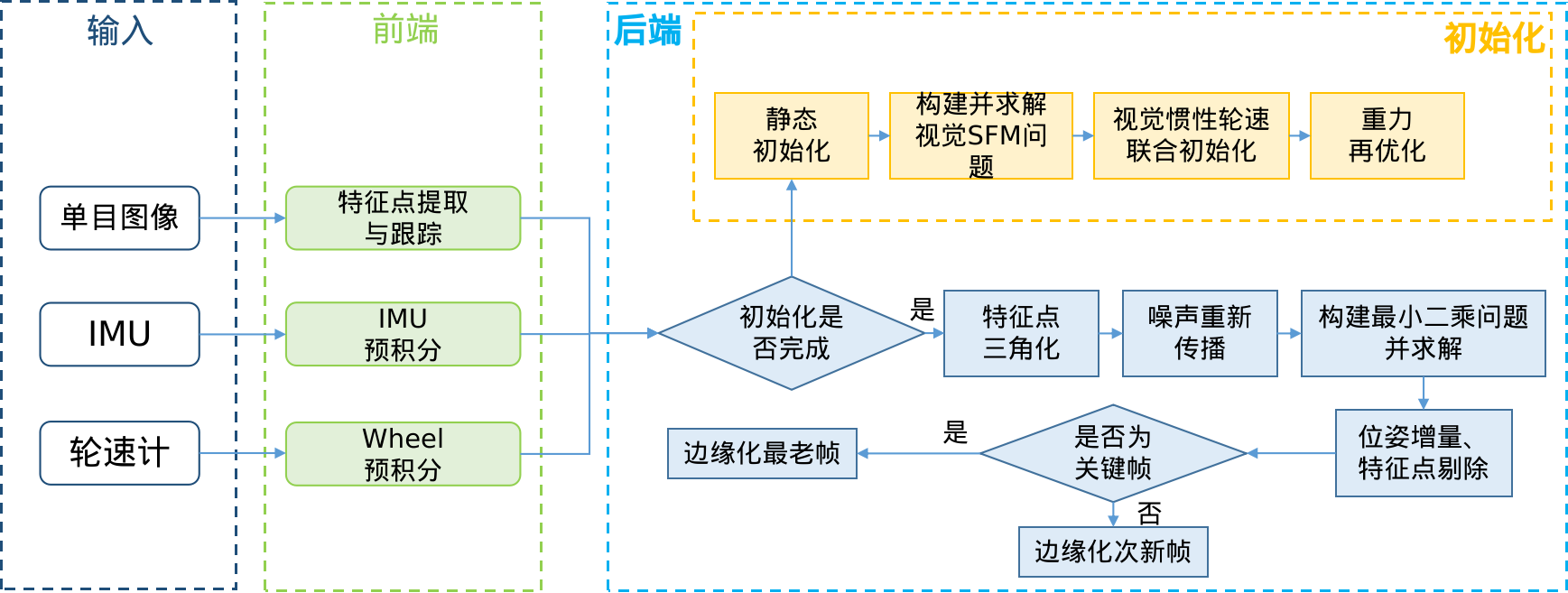
- 负责基于VINS框架实现融合单目相机、IMU和轮速计的紧耦合里程计系统,实现动、静态联合的鲁棒初始化,利用多种工程Trick实现割草机姿态的鲁棒估计,解决在轮子打滑、长静止、强颠簸、动态物体等场景下的轨迹漂移问题,在草地环境下RTE指标达1.2%, RRE指标达0.011deg/m。
- 负责构建融合VIW里程计、IMU&轮速计闭式积分里程计和RTK观测的松耦合因子图框架,实现局部ENU坐标系和全局ECEF坐标系外参的在线标定,解决RTK遮挡场景下系统持续定位问题,位姿融合框架下RTE指标降低到0.15%。
- 实现基于AprilTag的重定位误差评估算法。